Procedural Walking Animation
This prototype is about generating the character animation through code and inverse kinematics, instead of manually animating its walk cycle.
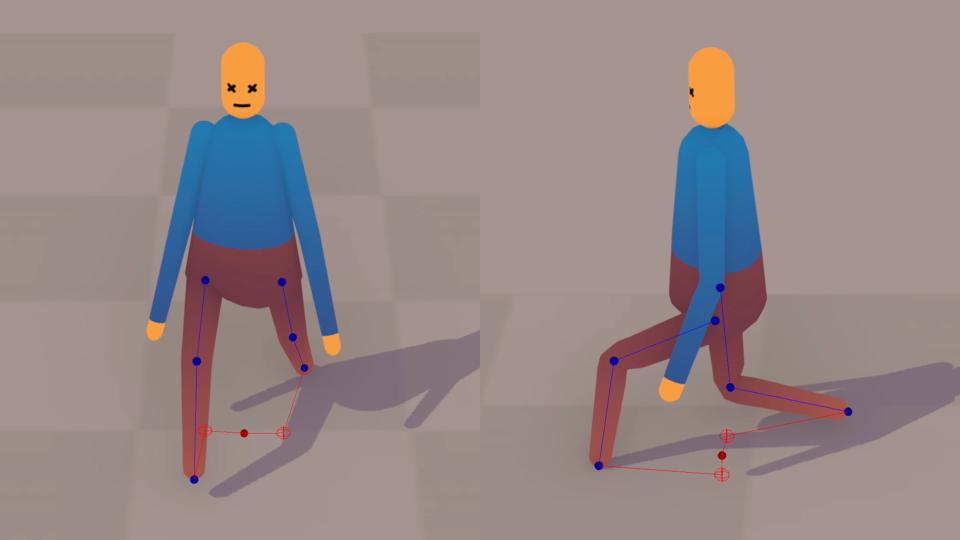
This prototype is about generating the character animation through code and inverse kinematics, instead of manually animating its walk cycle.
Published 2020.04.06